
Bende yardımcı olayım kırmızı kısmı ayarlamak için missonplannerda servo output sekmesi vardı orada min max ve trim değerlerinden ayarlana biliyorduDarthPac yazdı: ↑08 Ara 2020, 15:49 https://ibb.co/3kYCCJ1
Hocam kırmızılı kısmı denediniz mi? !Herhalde! (Emin değilim) bu da olmuyorsa mavi ile çizdiğim yazıdan dolayı olmuyor ki öyleyse sorun kalibrasyonda değil demektir.
Pervaneler takılı bile değilken yalpalama sorunu...
Re: Pervaneler takılı bile değilken yalpalama sorunu...
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Tekrar video hazırladım... Sanırım burda sorun daha net anlaşılacaktır.Xxgamer45 yazdı: ↑08 Ara 2020, 15:44Hocam hiç normal ben böyle tahmin etmemiştim değil motorlar çalışıyorken elinizi motorun yan tarafına ucundan deydirin motorlar sanki bir sağa bir sola dönüyor gibi
Siz kesinlikle alıcıya bağlayıp deneyin
Sorun evdemi yoksa kontrol kartındamı anlamış oluruz çok dağıtımınıza gerek yok esc nin kablosunu sökün ve alıcıya 3.ci takın alıcıyı pwm moda alın videoda olduğu gibi
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Kırmızı kısımda yer alan PWM özellikleri ile ilgili kumandada herhangi bir değişiklik yapmadım. Bendeki esc ler sanırım mavi kısımda yer alıyor. sorunun daha iyi anlaşılması için bir video daha yükledim.DarthPac yazdı: ↑08 Ara 2020, 15:49 https://ibb.co/3kYCCJ1
Hocam kırmızılı kısmı denediniz mi? !Herhalde! (Emin değilim) bu da olmuyorsa mavi ile çizdiğim yazıdan dolayı olmuyor ki öyleyse sorun kalibrasyonda değil demektir.
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Yazılım olarak Qgroundcontroller kullanıyorum mission planner kullanmadım sanırım ona geçmem gerekiyor.... sorunu çözemezsem bunu yapmayı planlıyorum.Xxgamer45 yazdı: ↑08 Ara 2020, 15:54Bende yardımcı olayım kırmızı kısmı ayarlamak için missonplannerda servo output sekmesi vardı orada min max ve trim değerlerinden ayarlana biliyorduDarthPac yazdı: ↑08 Ara 2020, 15:49 https://ibb.co/3kYCCJ1
Hocam kırmızılı kısmı denediniz mi? !Herhalde! (Emin değilim) bu da olmuyorsa mavi ile çizdiğim yazıdan dolayı olmuyor ki öyleyse sorun kalibrasyonda değil demektir.
Re: Pervaneler takılı bile değilken yalpalama sorunu...
xxgamer45 hocama katılıyorum çok garip bir durum.
Aklıma tek gelen şey motorların sorunlu olmasıdır.
Yazılımdan motorlara teker teker güç vermeyi denediniz mi? Belki sallantıyı yaratan motoru bulabiliriz.
Aklıma tek gelen şey motorların sorunlu olmasıdır.
Yazılımdan motorlara teker teker güç vermeyi denediniz mi? Belki sallantıyı yaratan motoru bulabiliriz.
Re: Pervaneler takılı bile değilken yalpalama sorunu...
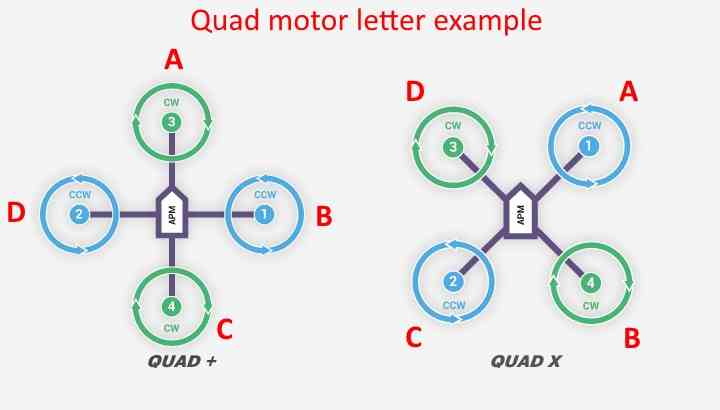
Videoda dronun önünü tam kesdiremedim attığım diyagramdaki quad x e göre motorlar doğru mu?
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Hocam bana sorun esc de gibi geldi eğer motor sargılarında bir sorun olsa çoktan bütün sistemden dumanlar çıkardı
Dediğim gibi esclerde alıcıya bağlayıp deneyin
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Birde hocam daha ayrıntılı bir video koyabilirmisiniz pilli takıtınızdan itibaren başlayıp esclere tam gaz verin daha sonra azaltın bakalım tepkileri nasıl olacak
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
yazılım üzerinden motorları tek tek çalıştırdım hiç bir sıkıntı yok zaten rolantide çalışırken de hiç sıkıntı yok sadece kalkışa geçince dengesizlik başlıyor...
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Hocam iki ihtimal var
Kontrol kartı
Esc
Hocam sorunun kaynağını halen bulabilmek için esc nin bir tanesini alıcıya takıp kumandadan ibus ve pwm seçip denermisniz eğer düzgün çalışırsa sorun kontrol kartıyla ilgili deriz eğer hala aynı şeyi yaparsa sorun esc de deriz
Denerken videoda atarsanız iyi olur
Ve yukarıdaki videoda gaz yaklaşık yüzde kaçta iken yapalamaya başlıyor
Kontrol kartı
Esc
Hocam sorunun kaynağını halen bulabilmek için esc nin bir tanesini alıcıya takıp kumandadan ibus ve pwm seçip denermisniz eğer düzgün çalışırsa sorun kontrol kartıyla ilgili deriz eğer hala aynı şeyi yaparsa sorun esc de deriz
Denerken videoda atarsanız iyi olur
Ve yukarıdaki videoda gaz yaklaşık yüzde kaçta iken yapalamaya başlıyor
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Sevgili DartPac bu resimdeki gibi bağladım motorları ve ne hikmetse gram titreme kalmadı
- Dosya ekleri
-
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Uçuş modları hakkında pek bilgim yok o yüzden topu Xxgamer45 hocama atmak daha mantıklı olur.
Pervane yönleri ve çeşitlerine dikkat ederseniz bir sorun olucağını zannetmem.
Yardım edebildiysek ne mutlu bize aramıza hoş geldiniz.
Pervane yönleri ve çeşitlerine dikkat ederseniz bir sorun olucağını zannetmem.
Yardım edebildiysek ne mutlu bize aramıza hoş geldiniz.
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Hoşbuldum
Görüşmek üzere hoşçakalın
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Hocam ilk defa uçuş yapıyorsanız pos hold kullanmanızı çok tavsiye etmem gps deki küçük bir oynama dronun sizden 2metre uzaklaşmasına neden olabilir. Onun dışında alt hold tavsiyemdir. Onun dışında stabilize de kullanılabilir.
Rtl ve land içinde şunları söylicem missonplannerda kullanırken rtl ilk defa aldığımda (daha üçüncü uçuşumda)bir anda dron büyük bir hızla 2 metreden 30metreye yükseldi ve agresif bir şekilde kalktığı noktaya gitmeye başladı en sonunda kalktığı noktaya büyük bir hassasiyetle indi.
Burda benim yaptığım en büyük hata normal boyuttan güçlü ve büyük bir frame i f550 yi autotune yapmadan varsayılan pid ayarları ile otomatik bir moda almak .Bbu nedenle hareketleri dengesiz ve agresifti ama sizde böyle bir sorun olmayacaktır genelde varsayılan pid ayarları bu boyuttaki dronlar için olur. İkınci bir şeyde Rtl ve land ile ilgili ayarlardan başlangıçta yükseleceği yüksekliği düzeltin bende 30 metredeymiş bir anda o kadar yükseğe çıkınca hissettiğiniz çağresizlik ve heyecan anlatılamaz ininceye kadar öylece bekliyorsunuz o kadar yüksekte manual moda alsanız görsel olarak yeterince net olmadığı için kontrol edemeyeceğinizi düşünerek hiç birşey yapmadan öylece bekliyorsunuz
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Tavsiyeler için çok teşekkür ederim. Sanırım siz mission planner kullanıyorsunuz yazılım olarak ben Qgroundcontrol kullanmayı tercih ettim çünkü yazılım dili Python. Stabil uçuşu sağladıktan sonra kaynak kodlarda değişiklik yapacağım. Yarın sahada stabilized mod kullanarak test yapmayı planlıyorum sonuçlarından haberdar ederimXxgamer45 yazdı: ↑08 Ara 2020, 19:14Hocam ilk defa uçuş yapıyorsanız pos hold kullanmanızı çok tavsiye etmem gps deki küçük bir oynama dronun sizden 2metre uzaklaşmasına neden olabilir. Onun dışında alt hold tavsiyemdir. Onun dışında stabilize de kullanılabilir.
Rtl ve land içinde şunları söylicem missonplannerda kullanırken rtl ilk defa aldığımda (daha üçüncü uçuşumda)bir anda dron büyük bir hızla 2 metreden 30metreye yükseldi ve agresif bir şekilde kalktığı noktaya gitmeye başladı en sonunda kalktığı noktaya büyük bir hassasiyetle indi.
Burda benim yaptığım en büyük hata normal boyuttan güçlü ve büyük bir frame i f550 yi autotune yapmadan varsayılan pid ayarları ile otomatik bir moda almak .Bbu nedenle hareketleri dengesiz ve agresifti ama sizde böyle bir sorun olmayacaktır genelde varsayılan pid ayarları bu boyuttaki dronlar için olur. İkınci bir şeyde Rtl ve land ile ilgili ayarlardan başlangıçta yükseleceği yüksekliği düzeltin bende 30 metredeymiş bir anda o kadar yükseğe çıkınca hissettiğiniz çağresizlik ve heyecan anlatılamaz ininceye kadar öylece bekliyorsunuz o kadar yüksekte manual moda alsanız görsel olarak yeterince net olmadığı için kontrol edemeyeceğinizi düşünerek hiç birşey yapmadan öylece bekliyorsunuz
ikinci bir sorum var bendeki alıcı 10 channel olarak geçiyor ama yazılımın içinde max 8 channel görünüyor nedir hikmeti acaba ??
Re: Pervaneler takılı bile değilken yalpalama sorunu...
hocam sizdeki altitud modunda kullanın bunun sayesinde siz istediğiniz yüksekliğe geldiğinizde 1-2 metre civarında altitud moduna aldığınızda gaz kolu ortalara yakın olduğunda dron aynı yükseklikte sabit kalarak size çok büyük bir kolaylık sağlayacakmcse_ahmet yazdı: ↑08 Ara 2020, 20:09Tavsiyeler için çok teşekkür ederim. Sanırım siz mission planner kullanıyorsunuz yazılım olarak ben Qgroundcontrol kullanmayı tercih ettim çünkü yazılım dili Python. Stabil uçuşu sağladıktan sonra kaynak kodlarda değişiklik yapacağım. Yarın sahada stabilized mod kullanarak test yapmayı planlıyorum sonuçlarından haberdar ederimXxgamer45 yazdı: ↑08 Ara 2020, 19:14Hocam ilk defa uçuş yapıyorsanız pos hold kullanmanızı çok tavsiye etmem gps deki küçük bir oynama dronun sizden 2metre uzaklaşmasına neden olabilir. Onun dışında alt hold tavsiyemdir. Onun dışında stabilize de kullanılabilir.
Rtl ve land içinde şunları söylicem missonplannerda kullanırken rtl ilk defa aldığımda (daha üçüncü uçuşumda)bir anda dron büyük bir hızla 2 metreden 30metreye yükseldi ve agresif bir şekilde kalktığı noktaya gitmeye başladı en sonunda kalktığı noktaya büyük bir hassasiyetle indi.
Burda benim yaptığım en büyük hata normal boyuttan güçlü ve büyük bir frame i f550 yi autotune yapmadan varsayılan pid ayarları ile otomatik bir moda almak .Bbu nedenle hareketleri dengesiz ve agresifti ama sizde böyle bir sorun olmayacaktır genelde varsayılan pid ayarları bu boyuttaki dronlar için olur. İkınci bir şeyde Rtl ve land ile ilgili ayarlardan başlangıçta yükseleceği yüksekliği düzeltin bende 30 metredeymiş bir anda o kadar yükseğe çıkınca hissettiğiniz çağresizlik ve heyecan anlatılamaz ininceye kadar öylece bekliyorsunuz o kadar yüksekte manual moda alsanız görsel olarak yeterince net olmadığı için kontrol edemeyeceğinizi düşünerek hiç birşey yapmadan öylece bekliyorsunuz
ikinci bir sorum var bendeki alıcı 10 channel olarak geçiyor ama yazılımın içinde max 8 channel görünüyor nedir hikmeti acaba ??
Re: Pervaneler takılı bile değilken yalpalama sorunu...
mcse_ahmet yazdı: ↑08 Ara 2020, 20:09Tavsiyeler için çok teşekkür ederim. Sanırım siz mission planner kullanıyorsunuz yazılım olarak ben Qgroundcontrol kullanmayı tercih ettim çünkü yazılım dili Python. Stabil uçuşu sağladıktan sonra kaynak kodlarda değişiklik yapacağım. Yarın sahada stabilized mod kullanarak test yapmayı planlıyorum sonuçlarından haberdar ederimXxgamer45 yazdı: ↑08 Ara 2020, 19:14Hocam ilk defa uçuş yapıyorsanız pos hold kullanmanızı çok tavsiye etmem gps deki küçük bir oynama dronun sizden 2metre uzaklaşmasına neden olabilir. Onun dışında alt hold tavsiyemdir. Onun dışında stabilize de kullanılabilir.
Rtl ve land içinde şunları söylicem missonplannerda kullanırken rtl ilk defa aldığımda (daha üçüncü uçuşumda)bir anda dron büyük bir hızla 2 metreden 30metreye yükseldi ve agresif bir şekilde kalktığı noktaya gitmeye başladı en sonunda kalktığı noktaya büyük bir hassasiyetle indi.
Burda benim yaptığım en büyük hata normal boyuttan güçlü ve büyük bir frame i f550 yi autotune yapmadan varsayılan pid ayarları ile otomatik bir moda almak .Bbu nedenle hareketleri dengesiz ve agresifti ama sizde böyle bir sorun olmayacaktır genelde varsayılan pid ayarları bu boyuttaki dronlar için olur. İkınci bir şeyde Rtl ve land ile ilgili ayarlardan başlangıçta yükseleceği yüksekliği düzeltin bende 30 metredeymiş bir anda o kadar yükseğe çıkınca hissettiğiniz çağresizlik ve heyecan anlatılamaz ininceye kadar öylece bekliyorsunuz o kadar yüksekte manual moda alsanız görsel olarak yeterince net olmadığı için kontrol edemeyeceğinizi düşünerek hiç birşey yapmadan öylece bekliyorsunuz
ikinci bir sorum var bendeki alıcı 10 channel olarak geçiyor ama yazılımın içinde max 8 channel görünüyor nedir hikmeti acaba ??
hocam qground ve miison planerdaki modları şöyle eşleştiriyim
QGround---- Missonplanner
altitude = alt hold
position = position hold veya pos hold
hold = ????
stabilize = stabilize
Land = Land
Return = RTL veya retunn the home
-
mcse_ahmet
- Mesajlar: 20
- Kayıt: 08 Ara 2020, 11:50
- Ad Soyad: ahmet mcse
Re: Pervaneler takılı bile değilken yalpalama sorunu...
Burada altitude modunun belli yükseklikte sabit kaldığını söylediniz bu modun kullanımı tam olarak nasıl acaba ? Ayrıca 10 kanal olan alııcı ve kumanda neden yazılımda 8 kanal acaba ???Xxgamer45 yazdı: ↑08 Ara 2020, 20:22mcse_ahmet yazdı: ↑08 Ara 2020, 20:09Tavsiyeler için çok teşekkür ederim. Sanırım siz mission planner kullanıyorsunuz yazılım olarak ben Qgroundcontrol kullanmayı tercih ettim çünkü yazılım dili Python. Stabil uçuşu sağladıktan sonra kaynak kodlarda değişiklik yapacağım. Yarın sahada stabilized mod kullanarak test yapmayı planlıyorum sonuçlarından haberdar ederimXxgamer45 yazdı: ↑08 Ara 2020, 19:14
Hocam ilk defa uçuş yapıyorsanız pos hold kullanmanızı çok tavsiye etmem gps deki küçük bir oynama dronun sizden 2metre uzaklaşmasına neden olabilir. Onun dışında alt hold tavsiyemdir. Onun dışında stabilize de kullanılabilir.
Rtl ve land içinde şunları söylicem missonplannerda kullanırken rtl ilk defa aldığımda (daha üçüncü uçuşumda)bir anda dron büyük bir hızla 2 metreden 30metreye yükseldi ve agresif bir şekilde kalktığı noktaya gitmeye başladı en sonunda kalktığı noktaya büyük bir hassasiyetle indi.
Burda benim yaptığım en büyük hata normal boyuttan güçlü ve büyük bir frame i f550 yi autotune yapmadan varsayılan pid ayarları ile otomatik bir moda almak .Bbu nedenle hareketleri dengesiz ve agresifti ama sizde böyle bir sorun olmayacaktır genelde varsayılan pid ayarları bu boyuttaki dronlar için olur. İkınci bir şeyde Rtl ve land ile ilgili ayarlardan başlangıçta yükseleceği yüksekliği düzeltin bende 30 metredeymiş bir anda o kadar yükseğe çıkınca hissettiğiniz çağresizlik ve heyecan anlatılamaz ininceye kadar öylece bekliyorsunuz o kadar yüksekte manual moda alsanız görsel olarak yeterince net olmadığı için kontrol edemeyeceğinizi düşünerek hiç birşey yapmadan öylece bekliyorsunuz
ikinci bir sorum var bendeki alıcı 10 channel olarak geçiyor ama yazılımın içinde max 8 channel görünüyor nedir hikmeti acaba ??
hocam qground ve miison planerdaki modları şöyle eşleştiriyim
QGround---- Missonplanner
altitude = alt hold
position = position hold veya pos hold
hold = ????
stabilize = stabilize
Land = Land
Return = RTL veya retunn the home
Re: Pervaneler takılı bile değilken yalpalama sorunu...
hocam altitude moduna aldığınızda siz gaz kolunu tam yukarı veya tam aşağı yapmassanız dron en son bırkatığınız irtifada sabit kalır ve siz yüksekliği sabit tutmak için uğraşmadan(yeni başlayanlar için ciddi bir uğraş) istediğiniz gibi hareket ettirebilirsiniz. tam yukarı veya tam aşağı yaparsanız ama yavaş bir şekilde yükselir ve alçalırmcse_ahmet yazdı: ↑08 Ara 2020, 20:43Burada altitude modunun belli yükseklikte sabit kaldığını söylediniz bu modun kullanımı tam olarak nasıl acaba ? Ayrıca 10 kanal olan alııcı ve kumanda neden yazılımda 8 kanal acaba ???Xxgamer45 yazdı: ↑08 Ara 2020, 20:22mcse_ahmet yazdı: ↑08 Ara 2020, 20:09
Tavsiyeler için çok teşekkür ederim. Sanırım siz mission planner kullanıyorsunuz yazılım olarak ben Qgroundcontrol kullanmayı tercih ettim çünkü yazılım dili Python. Stabil uçuşu sağladıktan sonra kaynak kodlarda değişiklik yapacağım. Yarın sahada stabilized mod kullanarak test yapmayı planlıyorum sonuçlarından haberdar ederim
ikinci bir sorum var bendeki alıcı 10 channel olarak geçiyor ama yazılımın içinde max 8 channel görünüyor nedir hikmeti acaba ??
hocam qground ve miison planerdaki modları şöyle eşleştiriyim
QGround---- Missonplanner
altitude = alt hold
position = position hold veya pos hold
hold = ????
stabilize = stabilize
Land = Land
Return = RTL veya retunn the home